Hello Sahabat Anak Kendali.
pada kesempatan kali ini saya akan melanjutkan pembahasan tentang Pemodelan Sistem Mekanik sebelumnya saya menulis tentang pembahasan menyeluruh tentang pemodelan sistem dan juga pemodelan sistem elektrik
seperti yang sudah dijelaskan pemodelan sistem sangat lah penting dalam bidang kendali karena sebagai acuan untuk mendesign sistem kendali atau control.
untuk pemodelan sistem mekanik juga sangat penting karena sistem mekanik dapet berupa Kendaraan, Lengan Robot, Rudal atau sistem mekanik yang lainya, adapun sistem mekanik ini dibagi menjadi dua yaitu sistem mekanik translasi dan sistem mekanik rotasi. pada beberapa sistem mekanik mungkin ada yang murni translasi atau juga murni rotasi tapi ada juga yang hybrid dimana sistem ini menggabungkan keduanya.
Sistem Mekanik Translasi
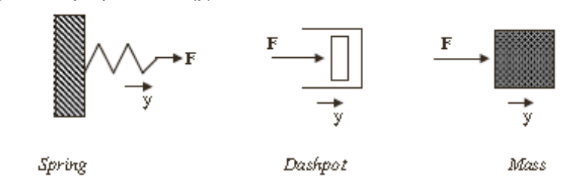
untuk sistem mekanik transalasi komponenya berupa spring atau disebut juga pegas, damper atau disebut peredam dan juga massa.
untuk inputnya berupa gaya (F) dan otputnya berupa pergeseran atau perpindahan (X)
untuk spring hubungan antara gaya dan pergeseran di rumuskan seperti berikut :
Pendahuluan Dalam dunia pengembangan perangkat lunak yang terus berkembang, Kubernetes telah muncul sebagai alat kunci dalam orkestrasi…
Mengelola sebuah sekolah atau lembaga pendidikan adalah tugas yang kompleks dan penuh tantangan. Dengan berbagai…
Selamat datang di artikel kami tentang cara menginstal OpenVPN server di Ubuntu 20.04 di HuaweiCloud!…
Dalam dunia pengembangan aplikasi, salah satu hal yang menjadi penting adalah mengelola dan memonitor kontainer…
Tutorial led blinking. LED (Light Emitting Diode) merupakan salah satu komponen elektronik yang paling umum…
Tutorial LCD Display, ini merupakan salah satu komponen yang sering digunakan dalam project elektronika sebagai…
{kind=link}