Hello Sahabat Anak Kendali.
pada kesempatan kali ini saya akan membahas mengenai identifikasi Sistem Dinamis
sebelumnya saya sudah membuat artikel terkait tentang Mengenal Sistem Kendali Kalang Tertutup (Close Loop)
Identifikasi adalah tahap pertama pada model-based control design proses.
adapun identifikasi sistem merupakan tahap pencarian atau proses membuat model matematis sebuah sistem dinamis dari pengambilan data Input dan Outputnya, aplikasi identifikasi sistem sangatlah luas seperti pada teknik mekanik, biologi, economi, contohnya engineer menggunakan model sistem yang menggambarkan hubungan antara input dan Outputnya.
misal pada sebuah motor DC maka yang diambil datanya berupa Tegangan dan RPM motor DC tersebut.
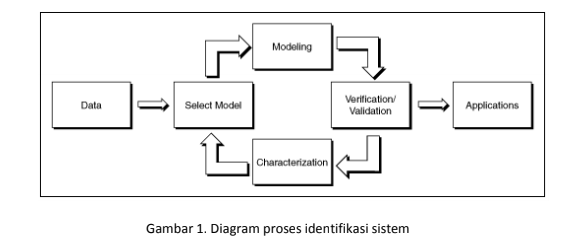
proses untuk melakukan identifikasi sistem yaitu:
-mengambil data dari suatu sistem
-membuat model berdasarkan data yang diambil tersebut
-memvalidasi model tersebut apakah sudah akurat atau belum, jika belum
-mengulangi proses identifikasi dari awal, sampai model yang kita buat benar sudah valid.
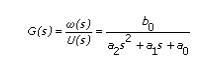
DC servo motor merupakan aktuator yang sangat familiar digunakan dalam bidang kendali, untuk mengestimasi model servomotor, pertama kita perlu melakukan pembuatan model yang sesuai dengan tujuan aplikasinya, dan model tersebut tidak diketahui parameter nya, jika kita ingin membuat kendali PID pada DC servomotor tersebut maka kita hharus membuat model berupa fungsi alih G(s) dari kecepatan putar w, dan tegangan pergerak U pada DC servomotor, yaitu :
sebelum mengidentifikasi sistem, pertama buat terlebih dahulu model matematis yang berisi parameter yang belum diketahui nilainya, kemudian lakukan proses identifikasi untuk mengestimasi parameter tersebut.
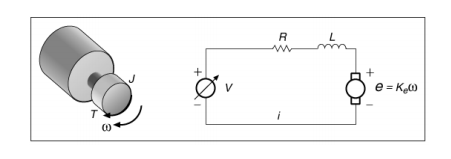
V adalah tegangan pada DC power supply.
R adalah resistance pada DC servomotor armature circuit.
L adalah inductance pada DC servomotor armature circuit.
i adalah circuit armature current.
ω adalah shaft speed pada DC servomotor.
T adalah torque pada DC servomotor.
tegangan V adalah Input dan w adalah Output DC servomotor, sesuai hukum faraday, memiliki hubungan berikut
T =Kt i
e =Ke w
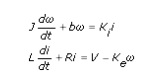
Kemudian sesuai hukum kirchof dan newton diperoleh persamaan berikut :
Pendahuluan Dalam dunia pengembangan perangkat lunak yang terus berkembang, Kubernetes telah muncul sebagai alat kunci dalam orkestrasi…
Mengelola sebuah sekolah atau lembaga pendidikan adalah tugas yang kompleks dan penuh tantangan. Dengan berbagai…
Selamat datang di artikel kami tentang cara menginstal OpenVPN server di Ubuntu 20.04 di HuaweiCloud!…
Dalam dunia pengembangan aplikasi, salah satu hal yang menjadi penting adalah mengelola dan memonitor kontainer…
Tutorial led blinking. LED (Light Emitting Diode) merupakan salah satu komponen elektronik yang paling umum…
Tutorial LCD Display, ini merupakan salah satu komponen yang sering digunakan dalam project elektronika sebagai…
{kind=link}
{kind=link}
{kind=link}
{kind=link}