Hello sahabat Anak Kendali.
pada kesempatan kali ini saya akan membagikan tulisan tentang Arduino, Cara Mengakses Sensor Gyro MPU6050 GY-521.
dimana sensor ini digunakan untuk membaca perubahan posisi atau juga disebut membaca kemiringan sudut berdasarkan Sensor accelerometer dan Sensor Gyroscope.
pada tutorial ini saya ingin memainkan beberapa LED ketika dimiringkan akan menyala sesuai posisinya. untuk lebih jelasnya silahkan nanti lihat video dibawah.
Download Ebook Tutorial ESP8266 Modul IOT www.anakkendali.com
langsung saja untuk tutorialnya pertama seperti biasa kita harus menyiapkan komponenya.
Arduino Nano / Arduino Uno / Arduino Mega2560 / Arduino Pro mini dan yang lainya
Sensor MPU6050 GY521
Led Super Bright
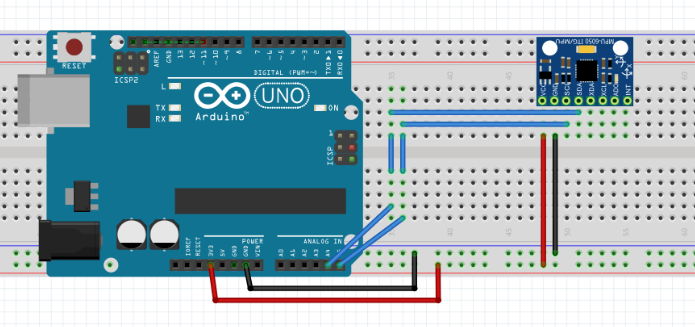
jika semua sudah ada silahkan buat rangkaianya seperti pada gambar berikut ini :
#include<Wire.h>
const int MPU_addr=0x68; // I2C address of the MPU-6050
int16_t AcX,AcY,AcZ,Tmp,GyX,GyY,GyZ;
byte led [] = {3,4,5,7,8,9,10};
void setup(){
Wire.begin();
Wire.beginTransmission(MPU_addr);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true);
Serial.begin(9600);
pinMode (10, OUTPUT);
pinMode (9, OUTPUT);
pinMode (8, OUTPUT);
pinMode (7, OUTPUT);
pinMode (5, OUTPUT);
pinMode (4, OUTPUT);
pinMode (3, OUTPUT);
}
void loop(){
Wire.beginTransmission(MPU_addr);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU_addr,14,true); // request a total of 14 registers
AcX=Wire.read()<<8|Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY=Wire.read()<<8|Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ=Wire.read()<<8|Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
Tmp=Wire.read()<<8|Wire.read(); // 0x41 (TEMP_OUT_H) & 0x42 (TEMP_OUT_L)
GyX=Wire.read()<<8|Wire.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L)
GyY=Wire.read()<<8|Wire.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L)
GyZ=Wire.read()<<8|Wire.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L)
Serial.print("AcX = "); Serial.print(AcX);
Serial.print(" | AcY = "); Serial.print(AcY);
Serial.print(" | AcZ = "); Serial.print(AcZ);
Serial.print(" | Tmp = "); Serial.println(Tmp/340.00+36.53); //equation for temperature in degrees C from datasheet
// Serial.print(" | GyX = "); Serial.print(GyX);
// Serial.print(" | GyY = "); Serial.print(GyY);
// Serial.print(" | GyZ = "); Serial.println(GyZ);
if (AcY < 4056 && AcY > 3356){
digitalWrite(led[0], 0);
digitalWrite(led[1], 0);
digitalWrite(led[2], 0);
digitalWrite(led[3], 0);
digitalWrite(led[4], 0);
digitalWrite(led[5], 0);
digitalWrite(led[6], 1);
}
else if (AcY < 3006 && AcY > 2356){
digitalWrite(led[0], 0);
digitalWrite(led[1], 0);
digitalWrite(led[2], 0);
digitalWrite(led[3], 0);
digitalWrite(led[4], 0);
digitalWrite(led[5], 1);
digitalWrite(led[6], 0);
}
else if (AcY < 1756 && AcY > 356){
digitalWrite(led[0], 0);
digitalWrite(led[1], 0);
digitalWrite(led[2], 0);
digitalWrite(led[3], 0);
digitalWrite(led[4], 1);
digitalWrite(led[5], 0);
digitalWrite(led[6], 0);
}
else if (AcY < 356 && AcY > -1062){
digitalWrite(led[0], 0);
digitalWrite(led[1], 0);
digitalWrite(led[2], 0);
digitalWrite(led[3], 1);
digitalWrite(led[4], 0);
digitalWrite(led[5], 0);
digitalWrite(led[6], 0);
}
else if (AcY < -1062 && AcY > -1268){
digitalWrite(led[0], 0);
digitalWrite(led[1], 0);
digitalWrite(led[2], 0);
digitalWrite(led[3], 1);
digitalWrite(led[4], 0);
digitalWrite(led[5], 0);
digitalWrite(led[6], 0);
}
else if (AcY < -1268 && AcY > -2824){
digitalWrite(led[0], 0);
digitalWrite(led[1], 0);
digitalWrite(led[2], 1);
digitalWrite(led[3], 0);
digitalWrite(led[4], 0);
digitalWrite(led[5], 0);
digitalWrite(led[6], 0);
}
else if (AcY < -2824 && AcY > -3824){
digitalWrite(led[0], 0);
digitalWrite(led[1], 1);
digitalWrite(led[2], 0);
digitalWrite(led[3], 0);
digitalWrite(led[4], 0);
digitalWrite(led[5], 0);
digitalWrite(led[6], 0);
}
else if (AcY < -3824 && AcY > -4824){
digitalWrite(led[0], 1);
digitalWrite(led[1], 0);
digitalWrite(led[2], 0);
digitalWrite(led[3], 0);
digitalWrite(led[4], 0);
digitalWrite(led[5], 0);
digitalWrite(led[6], 0);
}
delay(2);
}mungkin cukup itu dulu yang bisa saya tuliskan kali ini, kurang lebihnya mohon maaf, silahkan beri komentar masukan dan kritikanya di bawah.
Arduino, Aplikasi Komunikasi Serial Dua Arduino
untuk melihat hasil videonya silahkan tonton video dibawah ini.
Pendahuluan Dalam dunia pengembangan perangkat lunak yang terus berkembang, Kubernetes telah muncul sebagai alat kunci dalam orkestrasi…
Mengelola sebuah sekolah atau lembaga pendidikan adalah tugas yang kompleks dan penuh tantangan. Dengan berbagai…
Selamat datang di artikel kami tentang cara menginstal OpenVPN server di Ubuntu 20.04 di HuaweiCloud!…
Dalam dunia pengembangan aplikasi, salah satu hal yang menjadi penting adalah mengelola dan memonitor kontainer…
Tutorial led blinking. LED (Light Emitting Diode) merupakan salah satu komponen elektronik yang paling umum…
Tutorial LCD Display, ini merupakan salah satu komponen yang sering digunakan dalam project elektronika sebagai…
{kind=link}
View Comments
Permisi gan mau tanya.
Apakah bisa pakai I2C device address MPU6050 for write 0xD0 and for read 0XD1?
Dan apakah I2C device address MPU6050 for write 0x68 ketika AD0 low berhasil dipakai? soalnya pemrograman saya memakai CVAvr dan memakai address 0xD0 bisa membaca, tetapi tulisan yang terbaca tidak jelas.
catu sensor memakai 3 V atau 5 V gan?