pada kesempatan kali ini saya akan menuliskan Artikel tentang Arduino, Tutorial Fuzzy Logic Controll System Air Heater
Sebelumnya saya sudah menjelaskan Tutorial Dasar Dalam Mendesign Fuzzy, baik menggunakan CVAVR maupun Arduino
silahkan terlebih dahulu untuk membaca artikel berikut, untuk lebih memahami Konses Fuzzy Logic.
karena tidak semua program di buat dengan Copy paste, saat ada error langsung panik seketika seolah dunia mau kiamat.
Keyword :
Tutorial Fuzzy Arduino
Mengerti Fuzzy dengan Mudah
Belajar Fuzzy dengan Arduino
Contoh Program Fuzzy
Contoh Fuzzy Controll System
Belajar Fuzzy Logic
Fuzzy Program
pelajari semuanya perlahan, jangan langsung Copy Paste kemudian Error, beranggapan Codenya tidak Works.
tipe orang seperti ini mungkin kalo di dunia hacker sebutanya Script Kiddie. menggunakan code tanpa dia mengerti code tersebut. ya kira kira begitu.
untuk itu mari kita coba simak dengan seksama, dan jika belum menegerti, pelajari berulang – ulang, karena kemampuan otak kita tidak sehebat Imam Syafi’i, baca sekali langsung hafal.
sadar diri terhadap kemampuan, dengan cara berusaha lebih keras. karena yang saya lakukan juga banyak mengalami kegagalan, bahkan mungkin kegagalan saya lebih banyak.
baiklah lanjut mengenai Tutorial Fuzzy menggunakan Arduino Uno.
Arduino, Tutorial Fuzzy Logic (Fuzzifikasi)
Arduino, Tutorial Fuzzy Logic (Rule)
Arduino, Tutorial Fuzzy Logic (Defuzzifikasi)
setidaknya artikel diatas menjelaskan konsep dalam mendesain fuzzy. karena pada artikel ini, penjelasanya tidak selengkap yang di atas.
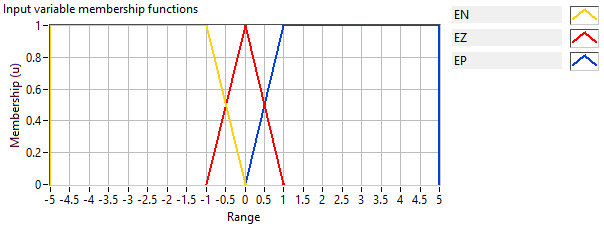
dalam mendesign Fuzzy, terlebih dahulu kita membuat Membership Function, biasa di kategorikan tahap Fuzzifikasi.
berikut adalah gambar fungsi keanggotaan dari Sistem Air Heater yang saya design
| Membership Error |
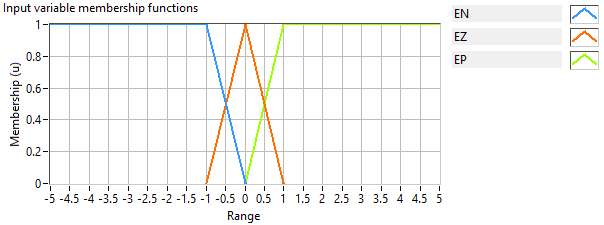
| Membership dError |
untuk membership Error dan dError sama, karena dError adalah hasil dari Error – Error Sebelumnya.
alasan kenapa dibuat seperti itu. begini penjelasanya.
kita tau Error = Sp – Suhu yang di Sensor
misalkan Sp = 30^C dan suhu yang disensor = 27^C maka Error = 3^C, dan Error = 3 membership nya termasuk pada bagian Error Positif dengan nilai keanggotaan = 1,
dan jika Sp = 30^C dan suhu yang di sensor = 32^C maka Error = -2^C dan Error = 3 membershipnya termasuk bagian Error Negatif dengan nilai Keanggotan = 1,
nah artinya, jika error < -1 maka didinginkan full, jika error > 1 dipanaskan Full, sedangkan selain itu, keputusanya di fuzzikan, entah didinginkan atau di panaskan.
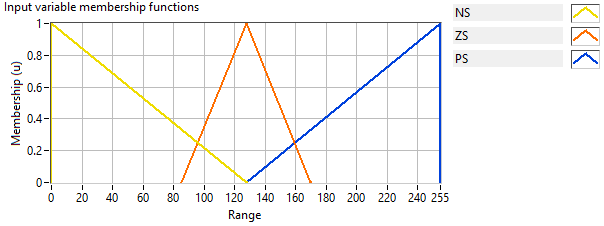
| Output PWM |
Membership Function untuk Output sangat penting di buat untuk menentukan Rule dan juga defuzzifikasinya.
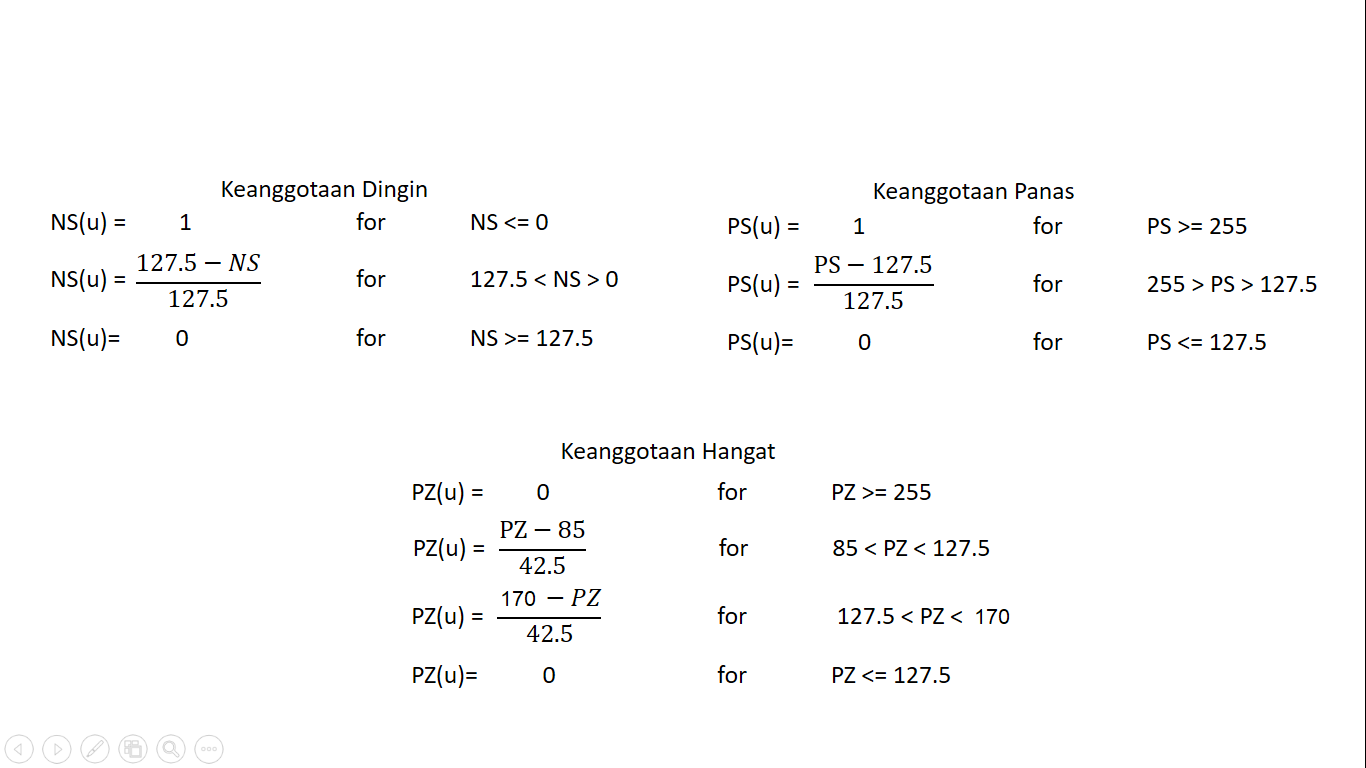
berikut adalah rumus dari membership function Output PWM
| Rumus dari Membership Function Output |
selanjutnya kita akan buat rule berdasarkan logika kita terhadap membership function yang sudah di buat.
Rule Fuzzy Air Heater
If Error = N And dError = N Then Out Dingin
If Error = N And dError = Z Then Out Dingin
If Error = Z And dError = N Then Out Dingin
If Error = Z And dError = Z Then Out Hangat
If Error = Z And dError = P Then Out Panas
If Error = P And dError = Z Then Out Panas
If Error = P And dError = P Then Out Panas
setelah itu kita bisa mengujikanya dengan program.
yang saya lakukan menguji dengan bahas C terlebih dahulu, menggunakan Code Block, untuk memvalidasi hasil Defuzzifikasinya. namun dengan Arduino IDE juga bisa dilakukan. terserah penggunanya.
nah berikut adalah program Lengkap Tutorial Fuzzy Logic Untuk Pengendali Air Heater
update Code :
float error_1, error, dError, pwm, Sp = 60;
float anggotaErrorN, anggotadErrorN, anggotapwmN;
float anggotaErrorZ, anggotadErrorZ, anggotapwmZ;
float anggotaErrorP, anggotadErrorP, anggotapwmP;
float rule1, rule2, rule3, rule4a, rule4b, rule5, rule6, rule7;
int def;
float suhu;
int val;
void error_suhu_N(){
if (error <=-1){ anggotaErrorN = 1;} else if (error > -1 && error < 0){ anggotaErrorN = (0 – error)/1;} else if (error >= 0) {anggotaErrorN = 0;}
}
void error_suhu_Z(){
if (error <=-1){ anggotaErrorZ = 0;} else if (error <= 0 && error >= -1){ anggotaErrorZ = (error + 1)/1;}
else if (error >= 0 && error < 1){ anggotaErrorZ = (1 – error)/1;} else if (error >= 1) {anggotaErrorZ = 0;}
}
void error_suhu_P(){
if (error >= 1){ anggotaErrorP = 1;}
else if (error < 1 && error > 0){ anggotaErrorP = (error – 0)/1;}
else if (error < 0 ) {anggotaErrorP = 0;}
}
void dError_suhu_N(){
if (dError <=-1){ anggotadErrorN = 1;} if (dError > -1 && dError <=0){ anggotadErrorN = (0 – dError)/1;} if (dError >= 0) {anggotadErrorN = 0;}
}
void dError_suhu_Z(){
if (error <=-1){ anggotadErrorZ = 0;} else if (dError <= 0 && dError > -1){ anggotadErrorZ = (dError + 1)/1;}
else if (dError >= 0 && dError < 1){ anggotadErrorZ = (1 – dError)/1;} else if (dError >= 1) {anggotadErrorZ = 0;}
}
void dError_suhu_P(){
if (dError >= 1){ anggotadErrorP = 1;}
else if (dError < 1 && dError > 0){ anggotadErrorP = (dError – 0)/1;}
else if (dError <= 0 ) {anggotadErrorP = 0;}
}
/*
void outPWM_N(){
if (pwm == 0){ anggotapwmN = 1;}
if (pwm > 0 && pwm < 127.5 ){ anggotapwmN = (0 – pwm)/80;}
if (pwm == 127.5) {anggotapwmN = 0;}
}
*/void fuzifikasi() {
error_suhu_N();
error_suhu_Z();
error_suhu_P();
dError_suhu_N();
dError_suhu_Z();
dError_suhu_P();
}
float Min (float a, float b) {
if (a < b) {
return a;
}
else if (b < a) {
return b;
}
else return a;
}
void rule() {
fuzifikasi();
// rule1 If Error = N And dError = N Then Out N
float x1 = Min (anggotaErrorN, anggotadErrorN);
rule1 = 127.5 – (127.5 * x1);
// rule2 If Error = N And dError = Z Then Out N
float x2 = Min (anggotaErrorN, anggotadErrorZ);
rule2 = 127.5 – (127.5 * x2) ;
//If Error = Z And dError = N Then Out P
float x3 = Min (anggotaErrorZ, anggotadErrorN);
rule3 = 127.5 – (127.5 * x3) ;
//If Error = Z And dError = Z Then Out Z
float x4 = Min (anggotaErrorZ, anggotadErrorZ);
rule4a = 85 + (42.5 * x4);
rule4b = 170 – (42.5 * x4);
//If Error = Z And dError = P Then Out P
float x5 = Min (anggotaErrorZ, anggotadErrorP);
rule5 = 127.5 + (127.5 * x5);
//If Error = P And dError = Z Then Out P
float x6 = Min(anggotaErrorP, anggotadErrorZ);
rule6 = 127.5 + (127.5 * x6);
//If Error = P And dError = P Then Out P
float x7 = Min(anggotaErrorP, anggotadErrorP);
rule7 = 127.5 + (127.5 * x7);
def = ((x1 * rule1) + (x2 * rule2) + (x3 * rule3) + (x4 * rule4a) + (x4 * rule4b) + (x5 * rule5) + (x6 * rule6) + (x7 * rule7)) / (x1 + x2 + x3 + x4 + x4 + x5 + x6 + x7);
}
void runFuzzy() {
bacaSuhu();
error_1 = error;
error = Sp – suhu;
dError = error – error_1;
rule();
analogWrite(5, def);
}
void setup()
{
Serial.begin(9600);
// Serial.println(rule1);
// Serial.println(rule2);
// Serial.println(rule3);
// Serial.println(rule4a);
// Serial.println(rule4b);
// Serial.println(rule5);
// Serial.println(rule6);
// Serial.println(rule7);
// Serial.print(“\n”);
//
// Serial.println(anggotaErrorN);
// Serial.println(anggotaErrorZ);
// Serial.println(anggotaErrorP);
// Serial.println(anggotadErrorN);
// Serial.println(anggotadErrorZ);
// Serial.println(anggotadErrorP);
// Serial.println(anggotadErrorP);
// Serial.println(anggotadErrorP);
// Serial.println(anggotadErrorP);
// Serial.print(“\n”);
//
//
}
void loop()
{
// if (Serial.available()){
// Sp = Serial.parseInt();
// }
runFuzzy();
// Serial.print(” “); Serial.print(error); Serial.print(” “);
// Serial.print(error_1); Serial.print(” “);
Serial.print(def);
Serial.print(” “); Serial.print(Sp); Serial.print(” “); Serial.println(suhu);
}
void bacaSuhu() {
val = analogRead(A0);
suhu = val / 2.0479;
delay(100);
}Pendahuluan Dalam dunia pengembangan perangkat lunak yang terus berkembang, Kubernetes telah muncul sebagai alat kunci dalam orkestrasi…
Mengelola sebuah sekolah atau lembaga pendidikan adalah tugas yang kompleks dan penuh tantangan. Dengan berbagai…
Selamat datang di artikel kami tentang cara menginstal OpenVPN server di Ubuntu 20.04 di HuaweiCloud!…
Dalam dunia pengembangan aplikasi, salah satu hal yang menjadi penting adalah mengelola dan memonitor kontainer…
Tutorial led blinking. LED (Light Emitting Diode) merupakan salah satu komponen elektronik yang paling umum…
Tutorial LCD Display, ini merupakan salah satu komponen yang sering digunakan dalam project elektronika sebagai…
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
View Comments
Bang maksud dari keterangan ini gmna ya ?
nah artinya, jika error 1 dipanaskan Full, sedangkan selain itu, keputusanya di fuzzikan, entah didinginkan atau di panaskan.
pernah belajar peluang? propbabilitas di matematika kan?
nilai 1 dianggap peluangnya bener2 mungkin pasti terjadi, sedangkan selain 1 itu kemungkinanya masih belum tentu terjadi, dan kemungkinan memiliki nilai maksimal =1, dan minimal adalah 0.
balik lagi ke pokok maslaah.
jika kontroler itu mendapat umpan balik dari sensor dan ternyata kesalahanya bernilai 1, atau bener2 salah. maka kontroler akan kasih perintah ke aktuator untuk melakukan sesuatu dengan kemampuan penuh. dalam hal ini adalah pemanas, maka pemanasnya di set menjadi benar2 sangat panas, karena kesalahanya bernilai 1.
sedangkan jika kesalahanya bernilai 0.98 atau 0.54 maka perintah yang dikasih controller untuk pemanas nya itu FUZZY, atau samar,, ga jelas,, belum tentu dipanasin atau di matikan pemanasnya.. tergantung rule, yang sudah kita buat sebelumnya.
semoga membantu.
Oh gitu.bang minta tolong jelasin yg code void error.msh blm paham.ada chanel yutube ga bang.mksh bang
Sya mau bikin alat penekuk akrilik.dengan variabel sbb:
1.tebal akrilik:tipis,sedang,tebal
2.derajat tekukan:lurus,bengkok.sngt bengkok
Output variabel:
PWM:hangt,panas,sngt panas.
Berarti pengambilan error & dErrornya dari tebal akril & derajat tekukan.bnr ga mas ?
sepertinya itu cocoknya untuk fuzzy open loop
om mau tanya ini nilai dari hasil defuzzifikasi digunakan buat kontrol pwm kipas apa pemanas.nya ya?
kipas cuma buat nyebarin panas gan,, tentu ke heater nya,,
nah ini kebalikannya dari project saya om.
kalo misal gini om " suhu = 36 C, set Point = 35, maka kn error -1"
nah ini biar hasil defuzifikasi.nya gak nol(0) apa yang harus d rubah om.?
om mau tanya ini nilai dari hasil defuzzifikasi digunakan buat kontrol pwm kipas apa pemanas.nya ya??
maaf agak mlenceng, kalo misal aktuator nya servo gmana gan membershipnya. Ini buat solar tracker pkek 2 sensor ldr
pake sudut servo nya bisa
bang mau tanya kok. bisa menentukan misal untk rule 1 punya rumus = 127,5-(127,5*x1)
nah itu cara nentuin rumus.nya dri mna ya mohon penjelasannya.
dari himpunan fuzzy
dari himpunan fuzzy output kah?
terus untuk metode agregasinya pakek apa ya?
kak, mau tanya perintah ini untuk apa ?
/*
void outPWM_N(){
if (pwm == 0){ anggotapwmN = 1;}
if (pwm > 0 && pwm < 127.5 ){ anggotapwmN = (0 – pwm)/80;}
if (pwm == 127.5) {anggotapwmN = 0;}
}
*/
perintah ini untuk apa ?
kenapa di kasih tanda komentar ?
apa karena variabel "outPWM_N() " belum di deklarasikan sebelumnya ?
pembatas
pembatas untuk apa ya kak. Soalnya juga gak dipanggil di main loop maupun fungsi lain?
nilai 2.0479 pada fungsi
"void bacaSuhu() {
val = analogRead(A0);
suhu = val / 2.0479;
delay(100);
}"
diperoleh dari mana ?
kenapa harus dibagi nilai terebut ?
biar dapat nilai suhunya dalam C.
kalo mau ikutin teori tiap perubahan 1C 0.1V kalo ga salah,, baca aja datasheet nya.
kalau itu kan untuk analogRead ya bang, kalau misal digitalRead apakah sama saja pembaginnya ?
digitalread kan 0 1 aja bang, pake on off controller aja.. atau kalo mau timmernya yang di controll ya disesuaikan aja
Selamat sore mas. Saya rencanya mau bikin alat penyemprot otomatis tanaman dengan variabel sbb:
input:
suhu = sejuk,sedang,hangat, dan panas
kelembaban= kering,normal, panas
Output variabel:
waktu penyalaan penyemprot= mati (0s), sangat cepat(3s), cepat (6s), agak cepat(9s), lama(12s),sangat lama (15s)
untuk codingannya sudah saya buat sesuai coding diatas meskipun terdapat beberapa perubahan. Namun nilai defuzzifikasinya tetap 0 dan penyemprot tidak menyala. itu bagaimana ya? apakah saya perlu mengirim codingan saya?
Selamat sore mas. Saya rencanya mau bikin alat penyemprot otomatis tanaman dengan variabel sbb:
input:
suhu = sejuk,sedang,hangat, dan panas
kelembaban= kering,normal, panas
Output variabel:
waktu penyalaan penyemprot= mati (0s), sangat cepat(3s), cepat (6s), agak cepat(9s), lama(12s),sangat lama (15s)
untuk codingannya sudah saya buat sesuai coding diatas meskipun terdapat beberapa perubahan. Namun nilai defuzzifikasinya tetap 0 dan penyemprot tidak menyala. itu bagaimana ya? apakah saya perlu mengirim codingan saya?