Helo temen-temen anak kendali.
Pada kesempatan kali ini kita akan membahas tentang Tutorial ESP32 Monitoring Water Level Notifikasi BOT Telegram, yang mana kita akan membuat suatu sistem pemantauan ketinggian air serta notifikasinya melalui telegram bot. dengan memanfaatkan telegram bot, kita bisa selalu memantau data ketinggian air dan dapat mengirim notifikasi saat ketinggian air tertentu.
Belajar ESP32, Notifikasi Sensor DHT11 dengan Telegram(Buka di tab peramban baru)
Sebelumnya juga sudah membahas hal terkait dengan proyek sistem pemantauan ketinggian air, dari mulai dasar pembacaan sensor jarak srf-04 dan juga mengirimkan datanya ke server thingspeak.

Langkah-langkah
Siapkan bahan-bahan yang dibutuhkan
Antara lain bahan yang dibutuhkan adalah :
- Modul ESP32 (Beli Via Tokopedia)
- Internet Wifi
- Sensor Jarak
- Kabel Jumper secukupnya
Siapkan BOT telegram dengan botfather
Caranya sangat mudah, buka aplikasi telegram kalian, kemudian tulis dipencarian botfather, kemudian awali dengan mengirim pesan /start. untuk memudahkan dalam memahami langkah membuat bot telegram dengan botfather bisa melihat gambar dibawah ini.




Copy-Paste API bot telegram
silahkan catat baik baik api bot yang dikasih oleh botfather untuk bot yang sudah dibuat, kemudian api ini akan digunakan pada program bot telegram arduino dengan esp32.
ESP8266,Tutorial Arduino Uno + ESP-01, Kontrol Relay Telegram Bot(Buka di tab peramban baru)
Download Library uTLGbotlib.h
Download terlebih dahulu library nya melalui software Arduino IDE, Buka menu sketch – Include Library – Manage Libraries. Kemudian cari dengan kata kunci utlgbotlib.h dan install
Tutorial ESP32 Mengakses Sensor Ultrasonik Sebagai Sensor Level Air(Buka di tab peramban baru)

Buat dan upload program Arduino untuk ESP32
Belajar ESP32, Tutorial Kontrol Relay Telegram Bot(Buka di tab peramban baru)
Silahkan upload program berikut ini pada modul ESP32 Sistem Pemantauan dan Alarm Ketinggian Air.
[sociallocker id=”4033″]
#include <Arduino.h>
#ifdef ESP8266
#include <ESP8266WiFi.h>
#else
#include <WiFi.h>
#endif
#include <utlgbotlib.h>
#define pintriger 14
#define pinecho 26
long durasi;
float cm, wl;
#define WIFI_SSID "anakkendali.com"
#define WIFI_PASS "mbuhbliweruh"
#define MAX_CONN_FAIL 50
#define MAX_LENGTH_WIFI_SSID 31
#define MAX_LENGTH_WIFI_PASS 63
#define TLG_TOKEN "1254655498:AAH0yMF9u9WNok2ekS9LE89-Qe7fewELGTo"
#define DEBUG_LEVEL_UTLGBOT 0
#define PIN_LED 2
const char TEXT_START[] =
"Hello, im a Bot running in an ESP microcontroller that let you turn on/off a LED/light.\n"
"\n"
"Check /help command to see how to use me.";
const char TEXT_HELP[] =
"Available Commands:\n"
"\n"
"/start - Show start text.\n"
"/help - Show actual text.\n"
"/ledon - Turn on the LED.\n"
"/ledoff - Turn off the LED.\n"
"/datawater - Show Water Level.\n"
"/ledstatus - Show actual LED status.";
char buff[30];
void wifi_init_stat(void);
bool wifi_handle_connection(void);
uTLGBot Bot(TLG_TOKEN);
uint8_t led_status;
void setup(void)
{
Bot.set_debug(DEBUG_LEVEL_UTLGBOT);
Serial.begin(9600);
digitalWrite(PIN_LED, LOW);
pinMode(PIN_LED, OUTPUT);
led_status = 0;
wifi_init_stat();
Serial.println("Waiting for WiFi connection.");
while (!wifi_handle_connection())
{
Serial.print(".");
delay(500);
}
Bot.getMe();
pinMode (pintriger, OUTPUT);
pinMode (pinecho, INPUT);
}
void srf() {
digitalWrite (pintriger, 0);
delayMicroseconds(2);
digitalWrite (pintriger, 1);
delayMicroseconds(10);
digitalWrite (pintriger, 0);
delayMicroseconds(2);
durasi = pulseIn(pinecho, HIGH);
cm = (durasi * 0.0343) / 2;
wl = 74.57 - cm; // 74.57 didapat dari pembacaan antara jarak sensor dengan dasar air
Serial.print("Jarak Sensor : ");
Serial.print(cm);
Serial.print(" Cm");
Serial.print("\t");
Serial.print("Ketinggian Air : ");
Serial.print(wl);
Serial.println(" Cm");
}
void loop()
{
if (!wifi_handle_connection())
{
// Wait 100ms and check again
delay(100);
return;
}
while (Bot.getUpdates())
{
// Show received message text
srf();
Serial.println("");
Serial.println("Received message:");
Serial.println(Bot.received_msg.text);
Serial.println("");
if (strncmp(Bot.received_msg.text, "/start", strlen("/start")) == 0)
{
Bot.sendMessage(Bot.received_msg.chat.id, TEXT_START);
}
else if (strncmp(Bot.received_msg.text, "/help", strlen("/help")) == 0)
{
Bot.sendMessage(Bot.received_msg.chat.id, TEXT_HELP);
}
else if (strncmp(Bot.received_msg.text, "/ledon", strlen("/ledon")) == 0)
{
led_status = 1;
digitalWrite(PIN_LED, HIGH);
Serial.println("Command /ledon received.");
Serial.println("Turning on the LED.");
Bot.sendMessage(Bot.received_msg.chat.id, "Led turned on.");
}
else if (strncmp(Bot.received_msg.text, "/ledoff", strlen("/ledoff")) == 0)
{
led_status = 0;
digitalWrite(PIN_LED, LOW);
Serial.println("Command /ledoff received.");
Serial.println("Turning off the LED.");
Bot.sendMessage(Bot.received_msg.chat.id, "Led turned off.");
}
else if (strncmp(Bot.received_msg.text, "/ledstatus", strlen("/ledstatus")) == 0)
{
if (led_status)
Bot.sendMessage(Bot.received_msg.chat.id, "The LED is on.");
else
Bot.sendMessage(Bot.received_msg.chat.id, "The LED is off.");
}
else if (strncmp(Bot.received_msg.text, "/datawater", strlen("/datawater")) == 0)
{
sprintf(buff, "Ketinggian Air : %f Cm\n", wl);
Bot.sendMessage(Bot.received_msg.chat.id, buff);
}
yield();
}
delay(1000);
}
void wifi_init_stat(void)
{
Serial.println("Initializing TCP-IP adapter...");
Serial.print("Wifi connecting to SSID: ");
Serial.println(WIFI_SSID);
WiFi.mode(WIFI_STA);
WiFi.begin(WIFI_SSID, WIFI_PASS);
Serial.println("TCP-IP adapter successfuly initialized.");
}
bool wifi_handle_connection(void)
{
static bool wifi_connected = false;
// Device is not connected
if (WiFi.status() != WL_CONNECTED)
{
if (wifi_connected)
{
Serial.println("WiFi disconnected.");
wifi_connected = false;
}
return false;
}
else
{
if (!wifi_connected)
{
Serial.println("");
Serial.println("WiFi connected");
Serial.print("IP address: ");
Serial.println(WiFi.localIP());
wifi_connected = true;
}
return true;
}
}
[/sociallocker]
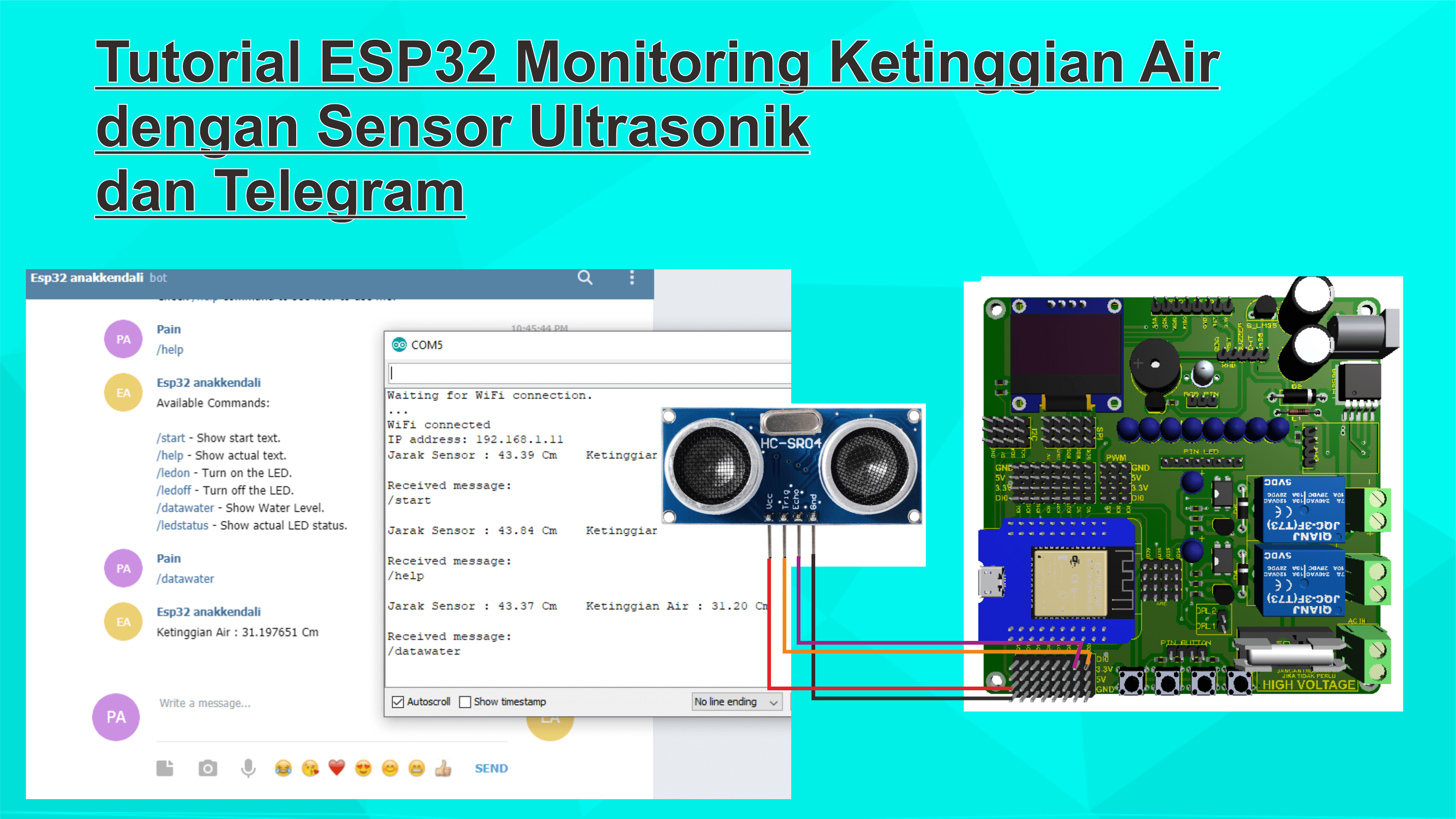
Hasil dari program diatas tampak seperti gambar berikut.
Arduino, Cara Upload Program di Semua Tab Arduino(Buka di tab peramban baru)
Assalamualaikum, bagaimana dengan circuit bagi projek ini ? Saya sudah berjaya masukkan coding ke esp8266 dan ianya berjaya connect dengan wifi yang saya sediakan . Tapi saya masih bingung dengan circuit nya.